Ein leichter Pilot entsteht….Vorbereitend auf den Einsatz des CrossAlps machte ich mir Gedanken über einen möglichst leichten Piloten bzw. leichten Rucksackmotor. Ich wollte den CrossAlps mit einem 12″ Propeller antreiben. Da gibt es den bekannten 12″-Metallkäfig , den EVO-Sitz und das EVO-Gurtzeug, alles aus dem Hause Hacker Motor GmbH. Das alles bringt natürlich schon einiges an Gewicht mit sich. Nimmt man den 4S-5000mAh Lipo-Akku noch dazu ist das Zielgewicht von unter 3 Kilogramm schwer zu erreichen. Also muss der Pilot möglichst leicht gebaut werden. Der Robin fiel somit schon mal aus dem Rennen.
Leichter Pilot
Eine Eigenkonstruktion, welche auch etwas aushält war dann der nächste Gedanke. Meine Idee war eine Grundplatte her zu nehmen, die Servos, den Kopf eines Action-Mans und die möglichst bruchfesten Beine mittels Winkel daran zu befestigen.

Grundplatte aus PVC (4mm), Gartenschlauch, Schuhe, EVO-Sitz und-Gurtzeug, Alubügel im XL-Format (Sonderanfertigung)
Da ich nicht der Mann der Pläne, sondern eher der Taten bin habe ich gleich mal losgelassen mit dem Bau der Pilotenpuppe. Erst Grundplatte mit Winkel für Servos’s (Savöx 1230SG) und Kopf zugeschnitten, gebohrt und die Teile drauf verschraubt.

Grundplatte mit Servo & Kopf (Testkopf)
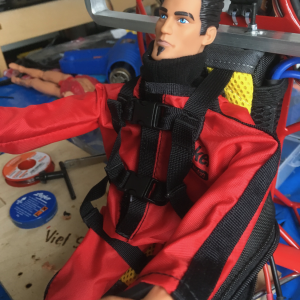
weiter ging es mit Anprobe des Overalls und der Sitzprobe im Gurtzeug

Sitzprobe fiel positiv aus, Overall sitz, wen auch noch etwas locker.

Der nettere Ausdruck im Gesicht…
Damit ich mich nicht immer erschrecke habe ich den endgültigen Kopf montiert, der schaut etwas friedlicher aus…
Der Kopf sitz auf einem normalen Alu-Winkel welcher an die Grundplatte verschraubt wird. Er wurde so montiert dass ich die Höhe desselben verstellen kann bis es gut ausschaut …

Montage des Kopfes mit Höhenverstellung
Als Arme wurden die üblichen Kunststoffarme mit der Acro-Umlenkung verwendet. Ebenso wurden die Schläuche als bruchsichere Beine montiert.
Pilotenpuppe mit den montierten Beine, Armen und Acro-Umlenkung.
Thema Gewicht
Als dann alles beisammen war habe ich den Motor (A30-10XL V4) Beschleunigerservo montiert einen Lipo (4S 5000mAh) reingepackt. Dann wurde mal geschaut was da so auf die Waage kommt.

Gewichts-Check mit 3017gr. erfolgreich bestanden.
Beschleuniger
Ein lieber Freund hat mir für den Beschleuniger noch Trommeln angefertigt. Dies hat er mit einem 3D-Drucker hingekriegt und ich darf nun schauen wie sich so etwas in der Praxis verhält.

Beschleuniger-Trommeln
Dass der Beschleuniger auch seinen Dienst verrichtet (es ist übrigens dasselbe Servo wie in den Armen verbaut), kann man auf dem kleinen Video hier sehen
Finish
So, Gewicht passt, Beschleuniger verrichtet seinen Dienst, funktionieren müsste das Ganze also…. jetzt müssen wir noch etwas am Finish arbeiten….Kopf mit Rollkragen schaut gut aus…Schuhe wirken noch etwas „klobig“..also schauen wir mal was sich da so finden lässt…
..und siehe da…das WWW hat wieder mal was hervorgebracht… Super coole Chuck Taylor All Stars…schauen die nicht Hammermässig aus?

Chuck Taylor All Star’s im Miniformat…

Rucksackmotor ist am CrossAlps eingehängt..bereit für den Erstflug…
Somit wäre dann das Thema soweit ich aktuell machen kann abgeschlossen…Der Modell-Gleitschirm ist auch eingetroffen, jetzt fehlt noch das passende Wetter für den Erstflug….von dem wird dann gesondert berichtet…



0 Comments